| ЛЕКЦИЯ 10 |
|
Краткое содержание: Метрический синтез типовых рычажных механизмов. Структурные схемы простейших типовых механизмов. Цель и задачи метрического синтеза механизмов. Методы метрического синтеза механизмов. Условия проворачиваемости звеньев механизма. Понятие о коэффициенте неравномерности средней скорости и о угле давления в рычажном механизме. Частные задачи синтеза: четырехшарнирный механизм - синтез по kv и синтез по двум положениям выходного звена; кривошипно-ползунный механизм - синтез по kv, по средней скорости ползуна, по двум положениям выходного звена; кулисный механизм - по рабочему перемещению выходного звена (для четырехзвенного механизма), по коэффициенту kv (для шестизвенного механизма). Оптимальный синтез рычажных механизмов. Синтез механизма по заданной функции положения.
Метрический синтез типовых рычажных механизмов.
Под метрическим синтезом или проектированием механизмов понимают определение линейных размеров и угловых положений звеньев по условиям рабочих положений и перемещений выходного звена. К решению задач метрического синтез приступают после определения структуры механизма - выбора его структурной схемы. В нашем курсе рассматриваются только простые типовые четырех- или шестизвеные рычажные механизмы.
Структурные схемы простейших типовых механизмов.
Цель и задачи метрического синтеза механизмов.
Цель метрического синтеза механизма - определение размеров механизма и положений его входного звена наилучшим образом удовлетворяющих заданным условиям и обеспечивающих наилучшее (оптимальное) сочетание качественных показателей.
Из множества возможных задач решаемых при метрическом синтезе наиболее распространены:
В качестве ограничений или качественных показателей при метрическом синтезе механизмов используются:
Методы метрического синтеза механизмов.
Как и общие методы проектирования, методы метрического синтеза условно делятся:
Условия проворачиваемости звеньев механизма.
Часто по условиям работы требуется, чтобы входное и (или) выходное звенья могли в процессе движения поворачиваться на угол более 360 градусов. Для обеспечения этого необходимо выполнить некоторые условия, которые накладываются на соотношение длин звеньев механизма.
Для четырехшарнирного механизма эти соотношения сформулированы в правиле или теореме Грасгофа:
Если сумма длин наибольшего и наименьшего звеньев меньше суммы двух остальных и стойкой является наименьшее звено, то механизм - двухкривошипный. Если неравенство выполняется, но стойкой является звено соединенное с наименьшим, то механизм - кривошипно-коромысловый. Во всех остальных случаях механизм - двухкоромысловый.
Математически это можно записать так:
при L1 > L2 > L3 > L4 , где Li присваивается значение длины звена, удовлетворяющей этому неравенству,
если L1 + L4 < L2 + L3 и L1 = l0 , то механизм двухкривошипный;
если L1 + L4 < L2 + L3 и L1 = l1 или L1 = l3 ,то механизм кривошипно-коромысловый;иначе механизм двухкоромысловый.
Для кривошипно-ползунного механизма условие существования кривошипа
l1 < l2 - | e | .
Если условие выполняется - механизм кривошипно-ползунный, нет - коромыслово-ползунный.
Понятие о коэффициенте неравномерности средней скорости и о угле давления в рычажном механизме.
1. Четырехшарнирный механизм.
Углом давления J называется угол между вектором силы действующей на ведомое звено с ведущего и вектором скорости точки приложения этой силы на ведомом звене.
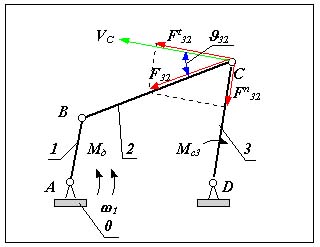
На рис. 10.7 изображен четырехшарнирный механизм . К входному звену 1 этого механизма приложен движущий момент Мд , к выходному звену 3 -
момент сопротивления Мс3. На этапе проектирования массы и моменты инерции звеньев не Рис. 10.7 определены, поэтому движущая сила действующая на ведомое звено - реакция F32 направлена по линии ВС, скорость точки ее приложения на звене 3 - VC направлена в сторону w 3 перпендикулярно звену 3. Угол J 32 между векторами F32 и VC - угол давления во вращательной паре С. С увеличением этого угла тангенциальная составляющая силы Ft32, способствующая повороту звена 3 в направлении w 3, уменьшается , а нормальная Fn32, которая не влияет на движение, а только деформирует (сжимает) звено 3, увеличивается. То есть с увеличением угла давления условия передачи сил в КП ухудшаются. Так как в реальных КП всегда имеется трение, то при определенной величине угла давления в КП возможно самоторможение или заклинивание. Самоторможение или заклинивание - это такое состояние механизма, когда в результате возрастания углов давления в одной из КП , движение механизма становится невозможным при сколь угодно большом значении движущей силы. Часто для характеристики условий передачи сил пользуются коэффициентом возрастания усилий (без учета трения)
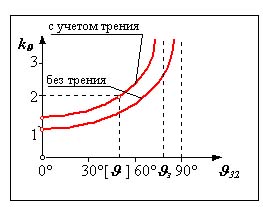
kJ = F32 / Ft32 = 1/ cos J 32 .
Так как в реальных механизмах всегда имеется трение, то заклинивание происходит при углах давления J з < 90° . При расчете задаются коэффициентом возрастания усилий (например kJ = 2) и определяют допустимый угол давления [J ]. Для предварительных расчетов принимают для механизмов только с вращательными парами [J ] = 45° - 60° , при наличии поступательных КП [J ] = 30° - 45° . Необходимо отметить, что в так называемых “мертвых” положениях механизма углы давления J = 90° . В статике в таком положении возможно заклинивание механизма, в динамике механизм проходит эти положения используя кинетическую энергию, которую запасли подвижные звенья.
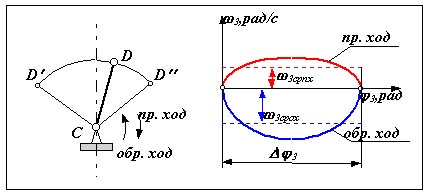
Коэффициентом неравномерности средней скорости kw называется отношение средней скорости выходного звена на обратном ходе w 3ср ох к средней скорости прямого хода w 3ср
kw = w3ср ох / w 3ср пх
где w 3ср ох = D j 3/tох ,
w 3ср пх = D j 3/tпх ,
tох и tпх - соответственно время обратного и время прямого хода.
При проектировании технологических машин, в которых нагрузка на выходном звене механизма на рабочем или прямом ходе намного больше нагрузки на холостом или обратном ходе, желательно, чтобы скорость выходного звена на прямом ходе была меньше, чем на обратном. С целью сокращения времени холостого хода, тоже необходимо увеличивать скорость при обратном ходе. Поэтому при метрическом синтезе механизма часто надо подбирать размеры звеньев обеспечивающие заданный коэффициент неравномерности средней скорости.
2. Кривошипно-ползунный механизм.
В кривошипно-ползунном механизме размеры механизма определяются углом давления в поступательной КП (рис.10.10).
Для этой схемы справедливы следующие соотношения:
Угол давления для внеосного кривошипно-ползунного механизма:
при прямом ходе
sin J пх = ( l1 - e )/ l2 *sin [ J пх];
при обратном ходе
sin J ох = ( l1 + e )/ l2 *sin [ J ох].
Для поступательной КП : [ J пх] = 30; [ J ох] = 45° , тогда
l1 / l2 *( sin [ J ох] + sin [ J пх] )/ 2 ; l1 / l2 *( sin [ 45° ] + sin [ 30° ] )/ 2 ;
l1 / l2=0.6
Решение задач метрического синтеза для типовых четырехзвенных механизмов.
1. Проектирование по коэффициенту неравномерности средней скорости .
a)четырехшарнирный механизм
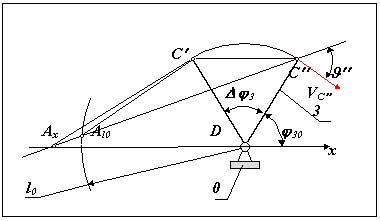
Дано: kw , HC, [ J ], j 30 , D j 3 , lDC
Определить: l i - ?
По kw рассчитывается угол q
_____________________________________________________
от оси х откладывается начальное положение выходного звена и его рабочее перемещение точки С в начальном и в конечном положениях соединяют прямой и от перпендикуляров к этой прямой откладываем углы q и проводим лучи C'О определяем точку О - центр окружности r0 проходящей через точки C', и искомую точку A. Положение точки A на этой окружности определяется в зависимости от исходных данных:
Затем по определенным таким образом размерам lAC' и lAC'' находим длины звеньев 1 и 2
lAC'= l2 + l1 , lAC'' = l2 - l1 ,
откуда
l1 = ( lAC'' - lAC' )/ 2 , l2 = ( lAC'' + lAC' )/ 2.
б)кривошипно-ползунный механизм;
Дано: kV, HC , [ J ]
Определить: l i - ?
По kV рассчитывается угол q
____________________________________________________
от оси х откладывается рабочее перемещение выходного звена HC , точки С в начальном C'' и в конечном C' положениях соединяют прямой и от перпендикуляров к этой прямой откладываются углы q и проводятся лучи C' О и C''О и определяем точку О - центр окружности r0 проходящей через точки C', C'' и искомую точку A. Положение точки A на этой окружности определяется:
Затем по размерам lAC' и lAC'' определяются длины звеньев 1 и 2
l1 = ( lAC' - lAC'' )/ 2 , l2 = ( lAC' + lAC' )/ 2.
2. Проектирование по двум положениям выходного звена .
а)четырехшарнирный механизм
Дано: [ J ], j 30 , D j 3 , lDC
________________________________ Определить: l i - ?
Решение проводится по схеме, которая изображена на рис. 10.13. Положение точки A определяется пересечением луча A С'' , проведенного Рис. 10.13 в точке С'' под углом J = [J ] к вектору скорости VC'' :
Затем, как описано выше, по размерам lAC'и lAC'' определяются длины звеньев 1 и 2.
Дано: [ J ], S30 , HC , e
________________________________ Определить: l i - ?
Решение проводится по схеме, которая изображена на рис. 10.14. Положение точки Ae определяется пересечением луча AС' , проведенного в точке С' под Рис. 10.14 углом J = [J ] к вектору скорости VC' с продолжением оси х . Затем, как описано выше, по размерам lAC' и lAC'' определяются длины звеньев 1 и 2.
Дано: hC , j 1 = j hC ,
l 2 = l2 / l1 , e = 0
Определить: li - ?
Спроецируем векторный контур lAB + lBC = lAC на оси координат:
l1 * cos j 1 + l2 * cos j 2 + hC = l1 + l2 ,
l1 * sin j 1 + l2 * sin j 2 = 0 ,
l1 / l2 * sin [ J ] или l2 / l1 = l 2 ;
откуда
l1 = hC / { 1-cos j 1 + [ 1 - cos ( arcsin (l 2 ? sin j 1)]/ l 2 },
l2 = l1 / l 2 .
3. Проектирование кривошипно-ползунного механизма по средней скорости ползуна .
Дано: HC , kV = 1 , e = 0 , [ J ] , n1ср
________________________________
Определить: li - ?
Средняя скорость ползуна
VCср = 2 * HC / T ,
где T = 1/ n1ср - период или время одного оборота кривошипа в с,
HC = 2* l1 - ход ползуна.
Размеры звеньев механизма
l1 = VCср / ( 4* n1ср ) , l2 = l1 / l 2 .
Рис. 10.15
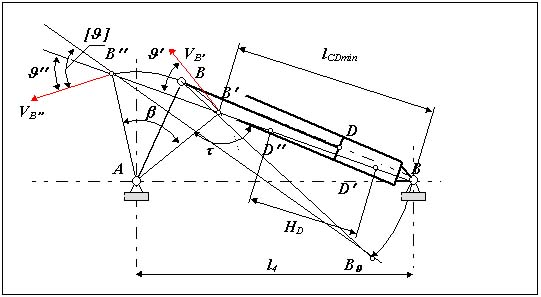
Дано: HD , b , [ J ]
_______________________
Определить: li - ?
Если расположить центр пары А на прямой соединяющей точки С' и С'' , то углы давления
J' = J' = b / 2,
тогда
l C' C'' »HD = 2 * l1 *sin (b / 2)
и l1 = HD / [2* sin (b / 2)].
Минимальная длина гидроцилиндра
lCDmin = k * HD ,
где k = 1.05 - 1.3 - коэффициент учитывающий особенности конструкции гидроцилиндра ( уплотнение, расположение опоры А и др. ).
Размер l4 можно определить из D BC? A
где cos t = - cos ( p - t ) = - sin J ? ,
и
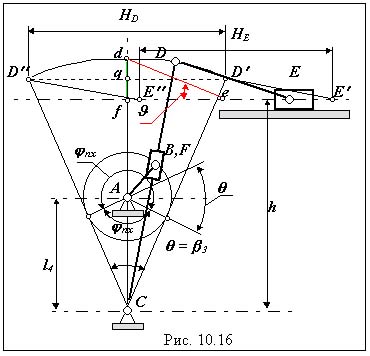
Дано: kV, HE , [ J ], l0
_____________________________
Определить: li , h - ?
Угловой ход кулисы
______________________________
Из D АВС длина звена 1
l1 = l0 *sin(b 3/2) = l0*sin(q /2).
Из D СD? q длина звена 3
l3 = HE / [2*sin(b 3/2)] = HE / [2*sin(q /2)] .
Длина звена 4 определяется по допустимому углу давления
sin J = (l3 - h)/l4 * sin [ J ].
Принимаем dq = qf , где dq = l3 * [ 1 - cos (q /2)], тогда
h = l3 * {1 - [ 1- cos (q /2)]/2},
l4 * ( l3 - h )/ sin [ J ] или l4 * ( l3*[ 1- cos (q /2)])/(2* sin [ J ]).
Оптимальный синтез рычажных механизмов.
Согласно энциклопедическому словарю, задача оптимального проектирования - это экономико-математическая задача, содержащая критерий оптимальности и ограничения и направленная на поиск лучшего в определенных условиях (т.е оптимального) значения показателя. Оптимизация - отыскание такого решения рассматриваемой задачи, которое дает экстремальное (минимальное или максимальное) значение некоторой функции, называемой целевой [ Ю.А.Казик Математический словарь. Таллин. “Валгус” 1985 ].
При оптимальном метрическом синтезе механизма необходимо определить такое сочетание его размеров (внутренние параметры), которое наилучшим образом удовлетворяет требуемым эксплуатационным и качественным показателям (критерии оптимизации и ограничивающие условия). При метрическом синтезе в качестве качественных показателей обычно используются: габариты механизма, точность обеспечения заданных положений или закона движения (функции положения или передаточной функции), условия передачи сил в КП (углы давления в КП) и другие показатели. Механизм при оптимальном проектировании характеризуется двумя n-мерными векторами: параметров и качественных показателей. На значения как парметров, так и качественных показателей могут быть наложены некоторые ограничения в виде равенств или неравенств. Ограничения могут быть:
Ограничения формируют область допустимых значений параметров, в пределах которой осуществляется поиск оптимального решения. В пределах этой области могут существовать локальные и глобальный оптимум целевой функции. Целевая функция может быть одномерной или многомерной. При многомерной оптимизации необходимо формирование сложной целевой функции, учитывающей вес каждого из качественных показателей, например, аддитивной
Ф ( G , d , J , ... ) = k1*G + k2*d + k3*J + ...
или мультипликативной функции
Ф ( G , d , J , ... ) = G k1 *d k2 * J k3 ? ...
где Ф ( G , d , J , ... ) - целевая функция, G - габариты механизма, d - точность механизма, J - углы давления в КП механизма, ki - весовые коэффициенты при качественных показателях.
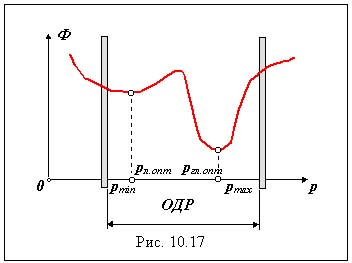
На рис. 10.17 представлена целевая функция при однопараметрической оптимизации ( р - параметр оптимизируемой системы ). Ограничения по параметру рmin и pmax определяют область допустимых решений (ОДР), в пределах которой проводится поиск оптимального решения. В нашем примере в этой области целевая функция имеет два минимума: локальный при рл.опт и глобальный при ргл.опт .
Задача считается решенной после определения глобального экстремума функции.
Методы решения задач оптимизации весьма разнообразны и являются предметом изучения в таких учебных дисциплинах как вычислительная математика, математическое программирование, САПР .
Синтез механизма по заданной функции положения.
Дано: Структурная схема механизма, функция положения выходного звена j 3 = П (j 1) на рабочем перемещении D j 3 при начальном положении j 30 .
Определить: Размеры звеньев механизма, обеспечивающие наилучшее приближение к заданной функции.
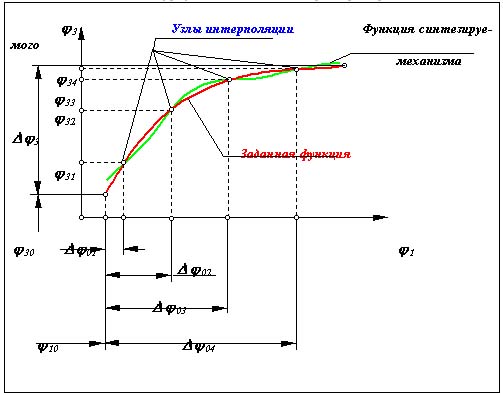
Предположим, что синтезируется четырехшарнирный механизм. Тогда необходимо определить размеры всех четырех звеньев механизма и начальное значение обобщенной координаты j 10 , т.е. пять неизвестных. Так как решается задача метрического синтеза, а абсолютные размеры звеньев определяются прочностными характеристиками, рабочими нагрузками и материалами, то целесообразно перейти к относительным размерам звеньев, приняв длину одного из них (например, стойки) равной единице. Общее число неизвестных, таким образом, сократится до четырех. Изобразим расчетную схему синтезируемого механизма и заданную функцию положения (рис. 10.18). Выберем на функции положения случайным образом (либо по какой-нибудь стратегии) четыре точки с координатами выходного звена j 31 ,j 32 ,j 33, j 34 . Для каждого из положений можно записать векторное уравнение или два уравнения в проекциях на оси координат (ось абсцисс совпадает с вектором l0 ):
l1 + l2 = l3 + l0 , l1 * sin j 1 + l2 * sin j 2 = l3 * sin j 3 ,
l1 * cos j 1 + l2 * cos j 2 = l3 * cos j 3 + l0 .
В число неизвестных в рассматриваемой задаче входят l1, l2, l3и j 10, l0 считаем заданным, приращения углов D j i1 определяются по заданной функции положения по выбранным значениям j 3i . Для определения четырех неизвестных необходимо задать как минимум четыре точки на заданном участке функции положения. По этим точкам составим систему четырех векторных уравнений
где второе уравнение каждой подсистемы в поекциях позволяет определить угол j 2i.
Из этой системы определим размеры звеньев механизма и начальное значение координаты j 10. Функция положения синтезированного таким образом механизма будет совпадать с заданной функцией в выбранных точках – узлах интерполяции. Наибольшие отклонения заданной и полученной функций будут находится между узлами интерполяции (рис.10.18). Изменяя положение узлов интерполяции в пределах рабочего перемещения выходного звена можно уменьшать отклонения полученной функции положения от заданной. При использовании метода наименьших квадратов число точек должно быть больше чем число неизвестных (хотя бы на единицу). Полученная функция положения при этом проходит не через узлы интерполяции, а так чтобы отклонения сумма квадратов отклонений в заданных точках была минимальна.