|
|
ЛЕКЦИЯ 4 |
|
|
Краткое содержание: Динамика машин и механизмов. Динамические параметры машины и механизма. Прямая и обратная задачи динамики. Механическая энергия и мощность. Работа внешних сил. Преобразование механической энергии механизмами. Аксиома об освобождения от связей. Силы и их классификация. Силы в КП без учета трения. Статический и кинетостатический силовой расчет типовых механизмов. Методы силового расчета (графоаналитический - планов сил, аналитический - метод проекций на оси координат).
Динамика - раздел механики машин и механизмов, изучающий закономерности движения звеньев механизма под действием приложенных к ним сил. В [ ] дано такое определение: “Динамика рассматривает силы в качестве причины движения тел”.
В основе динамики лежат три закона, сформулированные Ньютоном, из которых следует:
Из первого закона: Если равнодействующая всех внешних сил, действующих на механическую систему равно нулю, то система находится в состоянии покоя.
Из второго закона: Изменение состояния движения механической системы может быть вызвано либо изменением действующих на нее внешних сил, либо изменением ее массы.
Из этих же законов следует, что динамическими параметрами механической
системы являются:
Прямая задача динамики - определение закона движения системы при заданном управляющем силовом воздействии.
Обратная задача динамики - определение требуемого управляющего силового воздействия, обеспечивающего заданный закон движения системы.
Методы составления уравнений (динамической модели системы):
Работой называется интеграл скалярного произведения вектора силы F на вектор элементарного приращения перемещения точки ее приложения dS
Мощностью называется производная от работы по времени. Средняя мощность - отношение совершенной работы ко времени ее выполнения. Рассмотрим механическую систему на которую воздействуют m моментов и f сил. Элементарное приращение энергии системы (элементарная работа внешних сил, действующих на систему)
ее мощность
Рассмотрим как преобразуется поток механической энергии в идеальном механизме с жесткими звеньями (по идеальным механизмом
здесь понимаем механизм, в котором не потерь энергии, т.е. КПД которого равно h=1).
При этом входная мощность равна выходной Pвх = Pвых.
1. Механизм преобразующий вращательное движение
во вращательное.
так как
2. Механизм преобразующий вращательное движение в поступательное.
так как
Из теоретической механики: Не
изменяя состояния механической системы (движения или равновесия) связь,
наложенную на нее можно отбросить, заменив действие связи ее реакцией.
На рис. 4.3а изображена исследуемая система i
вместе с действующими на нее входной системой j
и выходной системой k и внешней средой
l.
Освобождаясь от связей наложенных на исследуемую
систему внешними системами, мы заменяем действие этих связей реакциями
Fij , Fik и
Fil.
Силой называется мера механического воздействия одного материального тела на другое, характеризующая величину и направление этого воздействия. Т.е. сила - векторная величина, которая характеризуется величиной и направлением действия. Если одно тело действует с некоторой силой на другое тело, то на него со стороны последнего также действует сила, равная по величине и противоположно по направлению (третий закон Ньютона). Таким образом, силы всегда действуют парами, т.е. каждой силе Fij , действующей с тела i на тело j, соответствует противодействующая сила Fji. Согласно действующей договоренности, в индексе обозначения на первом месте указывается тело на которое действует сила, на втором - с которого.
Все силы, действующие в механизмах, условно подразделяются на:
Сила, как векторная величина характеризуется относительно звеньев механизма тремя параметрами: координатами точки приложения, величиной и направлением. Рассмотрим с этих позиций реакции в КП плоских механизмов.
1. Поступательная КП. В поступательной КП связи, наложенные на относительное движение звеньев запрещают относительное поступательное движение по оси y и относительное вращение. Заменяя эти связи реакциями, получим реакцию Fij и реактивный момент Mij (см. рис. 4.4).
2. Вращательная КП. Во вращательной КП связи, наложенные на относительное движение звеньев запрещают относительное поступательное движение по осям y и x. Заменяя эти связи реакциями, получим реакцию Fij (см. рис. 4.5).
3. Высшая КП. В высшей паре связи,наложенные на относительное движение звеньев,
запрещают движение в направлении нормали к контактирующим поверхностям
(ось y). Заменяя эту связь реакцией, получим реакцию Fij (см.рис. 4.5).
При силовом расчете в высшей КП определяются:
Постановка задачи силового расчета: для исследуемого механизма при известных кинематических характеристиках и внешних силах определить уравновешивающую силу или момент (управляющее силовое воздействие) и реакции в кинематических парах механизма.
Виды силового расчета:
Для определения числа неизвестных, а, следовательно, и числа независимых уравнений, при силовых расчетах необходимо провести структурный анализ механизма и определить число и классы кинематических пар, число основных подвижностей механизма, число избыточных связей. Чтобы силовой расчет можно было провести, используя только уравнения кинетостатики, необходимо устранить в нем избыточные связи. В противном случае, к системе уравнений кинетостатики необходимо добавить уравнения деформации звеньев, необходимые для раскрытия статической неопределимости механизма. Так как каждая связь в КП механизма соответствует одной компоненте реакции, то число неизвестных компонент реакций равно суммарному числу связей накладываемых КП механизма. Уравновешивающая сила или момент должны действовать по каждой основной подвижности механизма. Поэтому суммарное число неизвестных в силовом расчете определяется суммой связей в КП механизма и его основных подвижностей
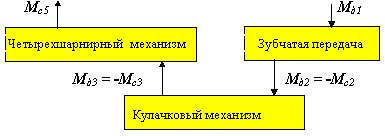
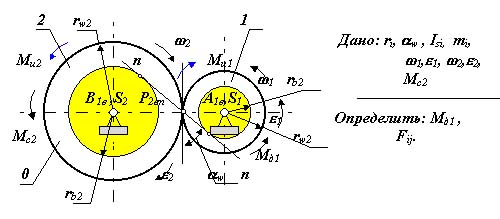
Рассмотрим механизм, состоящий из трех соединенных последовательно простых механизмов: зубчатой передачи, кулачкового механизма и четырехшарнирного рычажного механизма (рис. 4.6).
так как кинематические параметры aSi,
ei
механизма при кинетостатическом расчете заданы.
Определим подвижность, число избыточных
связей в механизме, а также число неизвестных в силовом расчете:
т.е в нашем механизме неизвестно 6 компонент реакций, для решения задачи силового расчета необходимо составить 6 уравнений
кинетостатики. Структурный анализ механизма показывает что механизм состоит
из одного первичного механизма (звено 1 и стойка) и монады (структурной
группы, состоящей из одного звена 2). Анализ начнем со второго звена, так
как о нем больше известно.
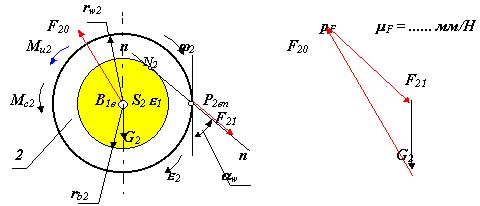
Расчетная схема для звена 2 приведена
на рис. 4.9.
уравнение моментов относительно точки В
Вначале решается уравнение моментов и определяется величина силы F21. Затем графически в масштабе mF, по векторному уравнению сил строится многоугольник (рис.4.10), из которого определяется величина и направление реакции F20.
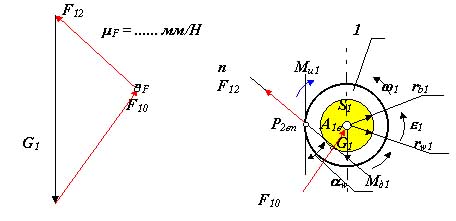
2.1. Звено 1.
Расчетная схема для звена 1 приведена на рис. 4.11.
Уравнения равновесия для звена 1: векторное уравнение силового равновесия
уравнение моментов относительно точки А
Для звена 1 движущий момент Mд1рассчитывается по уравнению моментов, а величина и направление реакции F10 определяется графически (рис.4.12), построением плана сил в масштабе mF.
Примечание: Кулачковый механизм рассчитывается аналогично, поэтому его силовой расчет не рассматриваем.
Изобразим расчетную схему механизма и нанесем на нее все внешние силы и моменты (рис.4.13).
Постановка задачи.
Дано: >li,
j3, w3,
e3, mi, Isi, Mc5.
Определить:Fij,
Mд3.
1. Определение подвижности механизма, числа избыточных связей в КП и числа неизвестных в силовом расчете.
2. Определение скоростей и ускорений звеньев и центров их масс.
3. Определение главных векторов и главных моментов сил инерции.
4. Кинетостатический расчет механизма.
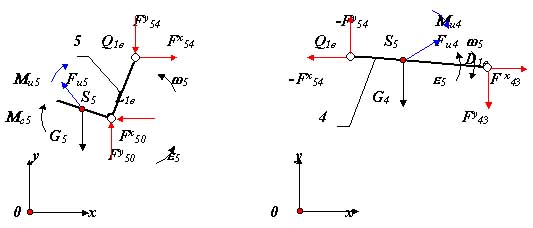
4.1 Звено 5 (рис. 4.14).
Уравнения силового равновесия в проекциях
на оси координат
4.2 Звено 4. (рис. 4.15).
Уравнения силового равновесия в проекциях
на оси координат
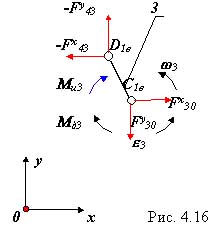
4.3 Звено 4. (рис. 4.16).
Уравнения силового равновесия в проекциях на оси координат
Таким образом мы составили систему 9-и уравнение с 9-ю неизвестными. При составлении этой системы были учтены равенства действия и противодействия Fij = - Fji ( без учета этих равенств общее число неизвестных и уравнений системы 18 ). Составим матрицу этой системы:
Из решения этой системы уравнений определяются реакции в КП и движущий момент Мд3
Примечание: Более подробно с силовым расчетом рычажных механизмов Вы познакомитесь на упражнениях и при выполнении 2-го домашнего задания.