Планетарной зубчатой передачей называют механизм для
передачи и преобразования вращательного движения, содержащий зубчатые колеса с
перемещающейся осью вращения хотя бы одного из них. Основными звеньями
планетарной зубчатой передачи являются центральные зубчатые колеса, оси которых
неподвижны, сателлиты - зубчатые колеса с перемещаемыми осями вращения и
водило - звено, в котором установлены оси сателлитов. Ось вращения
водила Н, совпадающая с осью О центральных колес, является
основной осью механизма.
На рисунках приведены структурные схемы типовых планетарных механизмов, а также диапазоны
рекомендуемых передаточных отношений и ориентировочные значения КПД для некоторых из них при этих
передаточных отношениях.
В процессе выполнения курсового проекта рекомендуется выбирать схемы
планетарных механизмов из основных (представленных ниже).
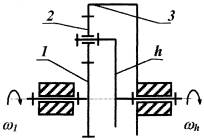
Однорядный планетарный механизм с одним внутренним и одним внешним зацеплением.
u1h3=1+z3/z1 передаточное отношение - 3…10
КПД - 0,97…0,99
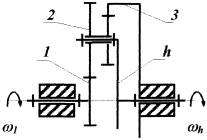
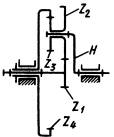
Двухрядный планетарный механизм с одним внешним и одним внутренним зацеплением.
u1h3=1+(z2z4)/(z1z3)
передаточное отношение - 7…16
КПД - 0,96…0,98
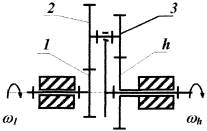
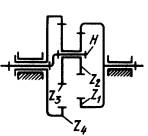
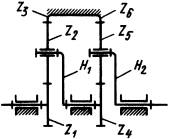
Двухрядный планетарный механизм с двумя внешними зацеплениями.
u1h3=1-(z2z4)/(z1z3)
передаточное отношение - 25…300
КПД - 0,9…0,3
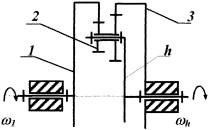
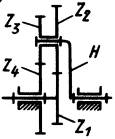
Двухрядный планетарный механизм с двумя внутренними зацеплениями.
u1h3=1-(z2z4)/(z1z3)
передаточное отношение - 30…300
КПД - 0,9…0,3
u1H4<=45
КПД - 0,94…0,97
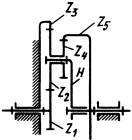
uH14=30...1000
КПД - 0,9…0,12
uH1=30...1000
u153=50...1000
КПД - 0,9…0,45
u1H2<=80
КПД - 0,90…0,96
Рекомендуемая последовательность проектирования планетарной передачи.
1. Ознакомиться с исходными данными и условиями работы планетарной передачи.
2. Определить требуемое передаточное отношение между угловыми скоростями входного
и выходного валов планетарной передачи (если оно не задано). Исходными являются
схема передачи вращательного движения от двигателя к рабочей машине, частоты
вращения валов двигателя и рабочей машины, передаточные отношения рядовых
зубчатых передач, ременных и цепных передач в общей кинематической цепи
привода.
3. Выбрать структурную схему планетарной передачи, соответствующую требуемому
передаточному отношению. Если структурная схема планетарной передачи задана, то
проверить, соответствует ли она требуемому передаточному отношению, и принять
необходимое решение об изменении исходных данных.
4. Используя формулу Виллиса для выбранной схемы планетарной передачи, вывести
формулу, связывающую передаточное отношение с числами зубьев колес.
5. Проанализировать ограничения, которые необходимо учитывать при выборе чисел
зубьев зубчатых колес, и записать их в аналитической форме. Выбрать стратегию
поиска наиболее подходящего варианта кинематической схемы планетарной передачи.
6. Методом перебора рассмотреть несколько вариантов решения и дать им
оценку. При использовании метода сомножителей в разложении заданного значения u1H
проанализировать приемлемость и рациональность вариантов выбора числовых значений сомножителей.
7. Определить приемлемые параметры кинематической
схемы планетарной передачи, удовлетворяющие заданным ограничениям.
8. На первом листе проекта определить числовое значение максимального суммарного
приведенного момента сил сопротивления на главном валу машины и привести его к
входному валу планетарной передачи.
9. Приняв определенные значения коэффициентов, связанных с условиями работы
передачи, материалом зубчатых колес, допускаемыми напряжениями на изгиб и
контактную выносливость, по частной формуле определить требуемое межосевое
расстояние передачи и модуль m зубчатых колес.
10. Определить размеры зубчатых колес для выбранных вариантов чисел зубьев и
принять решение об окончательных размерах зубчатых колес на стадии
предварительного решения задачи о синтезе передачи.
11. При наличии на кафедре разработанной программы синтеза планетарной передачи с
использованием ЭВМ ознакомиться с алгоритмом программы, вводом-выводом данных.
В соответствии со списком оператора ввода данных в ЭВМ подготовить переменные. После
выполнения вычислений на ЭВМ проанализировать результаты и сопоставить их с
предварительным решением, принятым на этапе 10.
12. На листе вычертить кинематическую схему спроектированного планетарного
редуктора в двух проекциях в произвольном масштабе (модуль зацепления можно принять равным единице).
На схеме изображают кинематическое исследование редуктора методом треугольников скоростей. (Часто кинематическое
исследование дополняется планом угловых скоростей механизма).