ЗАДАНИЕ №7
ПРОЕКТИРОВАНИЕ И
ИССЛЕДОВАНИЕ МЕХАНИЗМОВ КИСЛОРОДНОГО ДВУХЦИЛИНДРОВОГО КОМПРЕССОРА
Шаговый транспортер предназначен для непрерывного перемещения деталей с одной позиции на другую при последовательной обработке деталей на нескольких станках, объединенных в автоматическую линию. Детали о кол-ве z перемещаются одновременно в направлении технологической последовательности обработки по направляющим типа рольганга. Перемещение осуществляется с помощью штанги 5 и захватов 6, выступающих над направляющими.
Для
возвратно-поступательного
перемещения штанги
используется шестизвенный кулисно-ползунный механизм, состоящий из кривошипа 1, ползуна 2, кулисы 3, камня 4
и штанги 5 (рис. 7—1).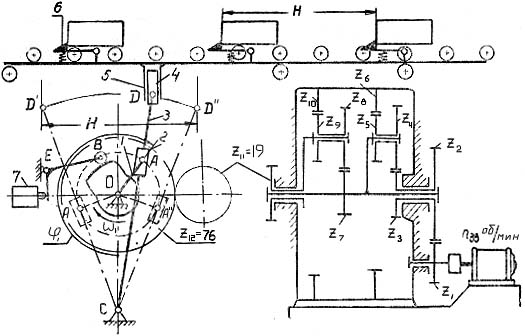
Рис. 7-1. Схема
кулисно-ползунного механизма шагового транспортера и кулачкового механизма
конечного переключателя.
Расстояние между рабочими позициями станков кратно шагу H транспортера. На величину этого шага деталь перемещается за один оборот кривошипа. По окончании рабочего хода детали закрепляются при помощи специальных зажимных устройств, команда на включение которых подаете с помощью конечного переключателя 7 и кулачкового механизма. При холостом ходе штанги 5 захваты 6 наталкиваются на неподвижную деталь, поворачиваются относительно оси и проходят под деталью.
Средняя скорость перемещения деталей ![]() обеспечивается при
помощи привода, состоящего из электродвигателя, зубчатой передачи
обеспечивается при
помощи привода, состоящего из электродвигателя, зубчатой передачи ![]() , планетарного четырехрядного редуктора
, планетарного четырехрядного редуктора ![]() зубчатой передачи
зубчатой передачи ![]() и кулисного
механизма.
и кулисного
механизма.
Число двойных ходов штанги в минуту ![]() определяют по
заданной средней скорости перемещения штанги
определяют по
заданной средней скорости перемещения штанги ![]() с учетом коэффициента
изменения средней скорости.
с учетом коэффициента
изменения средней скорости.
При проектировании
кулачкового механизма необходимо обеспечить включение зажимных устройств и поворота дискового кулачка, закрепленного
на одном валу с кривошипом, на угол, равный ![]() , и их своевременное
выключение в конце обратного хода штанги в соответствии циклограммой
приведенной на рис. 7—2.
, и их своевременное
выключение в конце обратного хода штанги в соответствии циклограммой
приведенной на рис. 7—2.
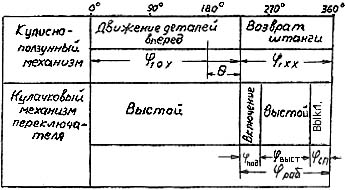
Рис 7-2. Циклограмма работы механизмов шагового
транспортера
При проектировании и исследовании механизмов
шагового транспортера считать известными параметры, приведенные в табл. 7—1.
компрессора является шестизвенный шарнирно-рычажной механизм.
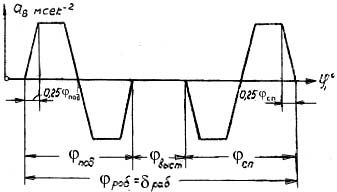
Рис. 7—3. Закон изменения ускорения толкателя кулачкового механизма конечного переключателя
При проектировании и
исследовании механизмов шагового транспортера считать известными параметры,
приведенные в табл. 7—1.
Объем и содержание курсового проекта.
Лист 1. Проектирование кулисного механизма и определение закона его движения.
- Определение основных размеров механизма по
заданным условиям.
- Определение момента инерции маховых масс,
обеспечивающих вращение кривошипа при установившемся режиме работы с
заданным коэффициентом неравномерности. Определение момента инерции
дополнительной маховой массы (маховика), установленной на валу электродвигателя (рис.7-1).
- Построение диаграммы изменения угловой
скорости кривошипа за время одного цикла установившегося режима. Основные результаты расчета привести в
таблице 1—1б(Приложение 1).
Примечание.
1. Длину штанги транспортера в зависимости
от кол-ва перемещаемых деталей рассчитывать по формуле: lш
=H(2zд +3).
2. Силы сопротивления движению транспортера
определять с учетом силы трения между
штангой и ее направляющими и между деталью и рольгангом.
3. Веса звеньев механизма и их моменты
инерции даны ориентировочно. Вес штанги транспортера подсчитывать с учетом ее
длинны в зависимости от кол-ва пер. деталей.
Лист. 2 Силовой расчет кривошипно-кулисного механизма.
1. Определение углового ускорения
звена приведения по
уравнению движения в
дифференциальной форме (на основании исследования, выполненного на листе 1
проекта) в
положении механизма
соответствующем заданному углу j1 . Определение линейных ускорений центров тяжести и угловых ускорений звеньев.
2. Построение картины силового
нагружения механизма.
3. Определение сил в кинематических
парах механизма.
4. Оценка точности расчетов,
выполненных на листах 1 и 2 проекта по уравнению моментов или уравнению сил для
ведущего или ведомого звена механизма.
Основные результаты расчета
привести в табл. 1—2 (Приложение
I).
Лист 3. Проектирование кулачковою механизма конечного переключателя.
- Определение угла (jраб = dраб) рабочего
профиля кулачка и его составляющих (jпод ,jвыст ,jсп) с учетом циклограммы работы механизмов транспортера (рис. 7—2).
- Построение кинематических диаграмм движения
толкателя (ускорения, скорости и
перемещения) с учетом заданного закона изменения ускорения толкателя (рис.
7—3).
- Определение основных размеров кулачкового
механизма наименьших габаритов с
учетом максимально допустимого угла давления
 .
. - Построение профиля кулачка (центрового и
конструктивного).
- Построение диаграммы изменения угла давлений
в функции угла поворота кулачка.
Основные результаты
расчета привести в табл. 1—3
(Приложение 1).
Лист 4. Проектирование зубчатой передачи и планетарного редуктора.
- Выполнение геометрического расчета
эвольвентой зубчатой передачи z1 , z2 (рис. 7-1).
- Построение схемы станочного зацепления при
нарезании колеса с меньшим числом зубьев и профилирование зуба (включая галтель) методом огибания.
- Вычерчивание схемы зацепления колес с
указанием основных размеров и элементов колес и передачи.
- Проектирование планетарного редуктора (рис.
7—1) ( подбор чисел зубьев) по заданному передаточному отношению редуктора
и числу сателлитов. Допустимое отклонение iред±5%. Колеса планетарного
редуктора нулевые; модуль колес принять равным единице.
- Определение передаточного отношения,
линейных скоростей и чисел
оборотов звеньев спроектированного редуктора графическим способом.
Основные результаты
расчета привести в таблице 1-4(Приложение 1).
Исходные данные Таблица 7-1
|
Наименование параметра |
Обозначение |
Размерность |
Числовые значения для вариантов |
||||
|
А |
Б |
В |
Г |
Д |
|||
|
1. Шаг транспортера |
H
|
м |
1,5 |
1,8 |
1,2 |
1,0 |
0,8 |
|
2.
Средняя скорость
перемещения деталей |
V5ср |
м/c |
0,091 |
0,075 |
0,083 |
0,091 |
0,100 |
|
3.
Коэффициент
изменения скорости штанги |
Кv |
- |
1,50 |
1,6 |
1,55 |
1,7 |
1,6 |
|
4.
Частота вращения
электродвигателя |
n |
c-1 |
16,70 |
15,86 |
16,37 |
24,05 |
24,38 |
|
5.
Кол-во
перемещаемых деталей |
zд |
шт |
10 |
8 |
6 |
10 |
8 |
|
6.
Вес детали |
Gд |
Н |
491 |
589 |
981 |
687 |
687 |
|
7.
Вес погонного
метра штанги |
q |
Н*м |
147 |
100 |
137 |
118 |
147 |
|
8.
Относительные размеры
звеньев кулисного механизма l=OC/DC |
l |
- |
0,50 |
0,60 |
0,65 |
0,50 |
0,55 |
|
9.
Приведенный
коэффициент трения деталей по направляющим |
fд |
- |
0,08 |
0,10 |
0,08 |
0,10 |
0,10 |
|
10.
Приведенный коэффициент
трения штанги по направляющим |
fш |
- |
0,10 |
0,08 |
0,10 |
0,08 |
0,08 |
|
11.
Момент инерции
кулисы относительно оси качения |
I3C |
КГ*м2 |
0,8 |
1,0 |
0,7 |
1,2 |
1,3 |
|
12.
Маховой момент
ротора электродвигателя |
mDд2 |
КГ*м2 |
0,10 |
0,15 |
0,12 |
0,08 |
0,06 |
|
13.
Маховой момент
зубчатых механизмов и муфты, приведенный к валу кривошипа |
mD12 |
КГ*м2 |
200 |
300 |
250 |
400 |
500 |
|
14.
Коэффициент
неравномерности вращения кривошипа |
d |
- |
0,050 |
0,035 |
0,040 |
0,05 |
0,08 |
|
15.
Угловая координата
кривошипа для силового расчета (рис. 7-1) |
j1 |
град |
120 |
150 |
210 |
240 |
150 |
|
16.
Углы поворота
дискового кулачка, соответствующие включению и выключению переключателя (рис.
7-2) |
jпод = jсп |
град |
40 |
50 |
45 |
50 |
60 |
|
17.
Угол поворота
толкателя в кулачковом механизме |
y |
>> |
15 |
20 |
25 |
20 |
25 |
|
18.
Длина толкателя |
lBE |
м |
0,10 |
0,12 |
0,15 |
0,08 |
0,09 |
|
19.
Максимально
допустимый угол давления в кулачковом механизме |
aдоп |
Град |
40 |
45 |
35 |
40 |
30 |
|
20.
Число зубьев
колеса Z1 |
Z1 |
- |
12 |
13 |
14 |
16 |
15 |
|
21.
Сумма чисел
зубьев колес в передаче Z1 , Z2 |
Zc= Z1+ Z2 |
- |
36 |
36 |
36 |
36 |
36 |
|
22.
Межосевое
расстояние первой зубчатой передачи Z1 , Z2 |
A
|
м |
0,150 |
0,150 |
0,150 |
0,150 |
0,150 |
|
23.
Модуль зубчатых колес
Z1 , Z2 |
m |
мм |
8 |
8 |
8 |
8 |
8 |
|
24.
Число сателлитов
в планетарном редукторе |
K |
Град |
3 |
3 |
3 |
3 |
3 |
|
25.
Параметр
исходного контура реечного инструмента |
aо |
- |
20 |
20 |
20 |
20 |
20 |
|
h*a |
- |
1 |
1 |
1 |
1 |
1 |
|
|
c* |
- |
0,25 |
0.25 |
0.25 |
0.25 |
0.25 |
|