|
|
ЛЕКЦИЯ 7 |
|
|
Краткое содержание: Режимы движения машины. Режим движения пуск-останов. Определение управляющих сил по параметрам движения при пуске и останове. Алгоритм решения прямой задачи динамики при неустановившемся режиме движения машины.
Режимы движения машины.
В зависимости от того какую работу совершают внешние силы за цикл движения машины различают три режима движения: разгон, торможение и установившееся движение. Циклом называют период времени или период изменения обобщенной координаты через который все параметры системы принимают первоначальные значения.
Режим движения "пуск - останов".
Существует большое количество машин и механизмов: гидроподъемники, манипуляторы, механизмы управления метательными аппаратами, механизмы шасси, механизмы автоматических дверей и многие другие, исполнительное звено которых перемещается из начального положения в конечное. При этом в начале и в конце цикла движения исполнительное звено неподвижно. Такой режим движения механизма называется режимом "пуск-останов". Механизм начинает движение из состояния покоя, в конце цикла выходное звено механизма должно остановиться и зафиксироваться в заданном положении. Возможны три варианта остановки выходного звена:
Для динамической модели в конечном положении
безударная остановка или остановка с удержанием в конечном положении (рис. 7.4) w 1n = 0, e 1n = 0 .
В этом случае к рассмотренному выше условию w 1n = 0 , добавляется условие e 1n = 0. Для динамической модели в конечном положении
e 1n = dw 1n/dt = М прå n / Iпрå n - w 1n2/(2* Iпрå n) * (d Iпрå n /dj 1),
Если w 1n = 0, Iпр > 0, то e 1n = 0 при М прå n = 0.
Таким образом при остановке с мягким ударом необходимо выполнить условие
w 1n = 0 => Аå n = 0;
при безударной установке и фиксации объекта в конечном положении нужно выполнить одновременно два условия
w 1n = 0 => Аå n = 0;
e 1n = 0 => М прå n = 0.
1. Безударная остановка объекта в конечном положении с фиксацией.
Для того, чтобы выполнить условия начала движения и остановки выходного звена в конечном положении необходимо соответствующим образом выбрать закон изменения движущих или управляющих сил. Три возможных диаграммы изменения движущих сил даны на рис. 7.5. Определение величин сил на этих диаграммах осуществляется из рассмотренных выше условий. Выведем формулы для расчета сил, используя в качестве примера механизм гидравлического подъемника, схема которого приведена на рис. 7.6.
Типовые диаграммы движущей силы.
Рис. 7.5
Гидроподъемник поворачивает платформу - звено 1 на заданный угол D j 1, при этом центр масс S1 поднимается на высоту HS1 под воздействием силы давления в гидроцилиндре Fд , закон изменения которой за цикл определяется одной из диаграмм, изображенных на рис. 7.5.
1. Определение величины силы Fд0 по условию начала движения e 10 > 0
k * abs (Мпрс 0 ) = Мпрд 0 ,
где k = 1.05 ... 2 - коэффициент запаса по моменту для разгона системы.
Раскрывая это уравнение, получим
откуда
2. Определение величины силы Fд n по условию в конце цикла e 1n = 0
abs (Мпрс n ) = Мпрд n .
Раскрывая это уравнение, получим
откуда
3. Определение величины силы Fд * по условию в конце цикла w 1n = 0,
Аå n = 0, Ад n = abs ( А cn );
для диаграммы движущей силы, изображенной на рис. 7.5 а
Fд 0 * a * HD + Fд * * ( b - a )* HD + Fд n * ( 1 - b ) * HD = G1 * HS1 ,
Fд * = G1 * HS1 - [ Fд 0 * a + Fд n * ( 1 - b )] * HD / [( b - a )* HD ].
Fд 0 * a * HD + 0.5* ( Fд 0 + Fд * ) * ( b - a )* HD + 0.5* ( Fд *+ Fд n )* ( 1 - b ) * HD =
= G1 * HS1 ,
Fд * = G1 * HS1 - [Fд 0 * a + 0.5* Fд 0 * ( b - a ) + 0.5* Fд n* ( 1 - b ) ] /
/ { 0.5* [( b - a ) + ( 1 - b )]* HD }.
Прямая задача динамики машины: определение закона движения при неустановившемся (переходном) режиме.
В отличие от установившегося режима движения режимы разгона и торможения называются неустановившимися. К этому режиму относят и режим движения "пуск-останов". Прямая задача динамики: определение закона движения машины при заданных внешних силовых воздействиях ( как сил и моментов сопротивления, так и движущих или управляющих сил ). Эта задача относится к задачам анализа, при которых параметры механизмов заданы, либо могут быть определены на предварительных этапах расчета. Для простоты и наглядности рассмотрим алгоритм решения этой задачи на примере конкретного механизма гидроподъемника. По условиям функционирования гидроподъемник за цикл движения должен переместить платформу 1 (рис. 7.6) на угол D j 1 и зафиксировать ее в конечном положении. При этом силы сопротивления определяются силами веса платформы и звеньев гидроцилиндра, движущие силы - давлением жидкости в цилиндре.
Алгоритм решения прямой задачи динамики при неустановившемся режиме .
Постановка задачи .
Дано: Кинематическая схема механизма и его размеры
lAB = 1 м, lBS1 = 2 м, lBD = 0.7м, lAC = 1.45м,
lBS2 = 0.35м, lBS3 = 0.4 м;
массы и моменты инерции звеньев m1 = 1000 кг,
IS1 = 800 кг * м 2, m2 = 50 кг, IS2 = 2 кг * м 2, m3 = 100 кг,
IS3 = 5 кг * м 2; w 1нач = 0, D j 1 = 30° , j 1нач = 0.
____________________________________________
Определить: w 1 = f(j 1 ), t = f(j 1 ), w 1 = f( t ), e 1 = f(j 1 ).
1. Выбор динамической модели и определение ее параметров.
В качестве динамической модели принимаем звено 1, совершающее вращательное движение вокруг точки А с круговой частотой w 1 , положение которого определяется обобщенной координатой j 1 . Параметры динамической модели: суммарный приведенный момент инерции звеньев механизма Iпрå и суммарный приведенный момент, действующих на него внешних сил, Mпрå определяются в следующей последовательности:
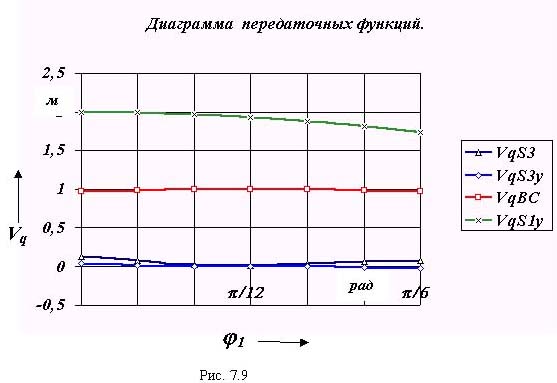
1.1. Определение кинематических передаточных функций для звеньев механизма u21 = u31 , центров масс VqS1 , VqS2 и VqS3 и точки приложения движущей силы VqD . Для определения этих функций воспользуемся методом проекций векторного контура механизма .
Рассмотрим следующие векторные контуры:
l AB = l AC + l CB;
l AD = l AB + l BD;
l AS2 = l AC + l CS2;
l AS3 = l AC + l CS3;
l AS1 = xS1 + yS1 .
Для первого векторного контура l AB = l AC + l CB проекции на оси координат
lAB * cos j 1 = xC + lCB * cos j 2 , lAB * sin j 1 = yC + lCB * sin j 2 , j 2 = arctg [( lAB * sin j 1 - yC )/( lAB * cos j 1 - xC )].Производные от этих выражений по j 1
- lAB * sin j 1 = VqCB * cos j 2 - lCB * u21* sin j 2 , lAB * cos j 1 = VqCB * sin j 2 + lCB * u21* cos j 2 ,позволяют определить первые передаточные функции
u21 = lAB* ( sin j 1* tgj 2 + cos j 1 )/ [ lCB* ( sin j 2* tgj 2 + cos j 2 )], VqCB = - lAB* ( sin j 1 - cos j 1 * tgj 2)/ ( sin j 2* tgj 2 + cos j 2 ).Для второго векторного контура l AD = l AB + l BD проекции на оси координат
xD = xB + lBD * cos (j 2 + p ), yD = yB + lBD * sin (j 2 + p ) .Производные от этих выражений по j 1
VqDx = VqBx - lBD * u21* sin (j 2 + p ), VqDy = VqBy + lBD * u21* cos (j 2 + p ) ,позволяют определить первую передаточную функцию
Для третьего векторного контура l AS2 = l AB + l BS2 проекции на оси координат
xS2 = xB + lBS2 * cos (j 2 + p ),
yS2 = yB + lBS2 * sin (j 2 + p ) .
Производные от этих выражений
VqS2x = VqBx - lBS2 * u21* sin (j 2 + p ),
VqS2y = VqBy + lBS2 * u21* cos (j 2 + p ) ,
позволяют определить первую передаточную функцию
Для четвертого векторного контура l AS3 = l AС + l С S3 проекции на оси координат
xS3 = xС + lBS3 * cos j 2 ,
yS3 = yС + lBS3 * sin j 2 .
Производные от этих выражений
VqS3x = - lС S3 * u21* sin j 2 ,
VqS3y = lCS3 * u21* cos j 2 ,
позволяют определить первую передаточную функцию
Для последнего пятого векторного контура l AS1 = xS1 + yS1 проекции на оси координат
xS1 = lAS1 * cos j 1 ,
yS1 = lAS1 * sin j 1 .
Производные от этих выражений по j 1
VqS1x = lAS1 * sin j 1 ,
VqS1y = lAS1 * cos j 1 ,
позволяют определить первую передаточную функцию
Построим графики передаточных функций и передаточных отношений, которые необходимы для определения параметров динамической модели в нашем примере.
1.2. Определение движущей силы по условиям в начале и в конце цикла.
Расчет проведем для закона изменения движущей силы, который изображен на рис.7.5. Величина движущей силы в начальном положении механизма рассчитывается по формуле
Принимаем k=1.1 и получаем
Fд0 = 1.1* abs (10000* 2 + 500* 0.97 + 1000* 0.0342)/ 0.967 = 23341.3 Н.
В конечном положении величина движущей силы рассчитывается по формуле:
Fд n = abs (10000* 1.732 + 500* 0.984 + 1000* 0.0207)/ 0.9731 = 18325.7 Н.
Значение движущей силы в интервале ( b - a )* HD определим по формуле:
Fд * = {abs( G1 * HS1 + G2 * HS2 + G3 * HS3 )-Примем a = 0.32 и b = 0.65 и рассчитаем перемещения центров масс
HS1 = yS1n - yS10 = 1 - 0 = 1 м; HS2 = yS2n - yS20 = 0.162 - (-0.338) = 0.5 м;
HS3 = yS3n - yS30 = -0.364 - (-0.364) = 0;
подставим полученные значения в формулу и получим
Fд * = {abs( 10000*1+ 500*0.5 + 1000*0)- [23341.3*0.32 + 18325.7* *(1 - 0.65 )]*0.518}/[( 0.65 - 0.32 )* 0.518] = (10250 - 7191)/0.171 = 17889 Н .1.3. Определение приведенного суммарного момента .
В нашем примере силами сопротивления являются силы веса звеньев механизма, поэтому расчет суммарного приведенного момента сил сопротивления проводим по формуле
В нашем примере только одна движущая сила, создаваемая давлением жидкости в гидроцилиндре. Приведенный момент от этой силы
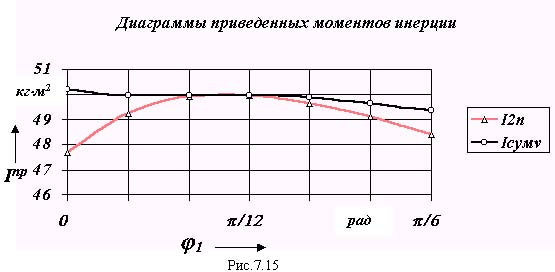
На рис. 7.13 приведены диаграммы приведенных моментов: сопротивления Мпрå с , движущего Мпр Fд i и суммарного Мпрå с = Мпрå + Мпр Fд i .
1.4. Определение суммарного приведенного момента инерции
В рассматриваемом механизме приведенный момент инерции суммируется из масс и моментов инерции звеньев и может быть рассчитан по следующей зависимости
Графики переменной части суммарного приведенного момента инерции даны на рис. 7.13 и 7.14. Кроме того, имеется и постоянная часть Iпрå c, определяемая массой и моментом инерции звена 1
Iпрå c = m1 * (VqS1)2 + IS1 = 1000 * (2)2 + 800 = 4800 кг * м 2 .Суммарный приведенный момент инерции и равен сумме постоянной и переменной частей
Iпрå = Iпрå c + Iпрå v .2. Определение суммарной работы внешних сил.
Суммарную работу внешних сил получим интегрированием суммарного приведенного момента Мпрå по обобщенной координате dj 1
tg y 1 = yMпрå 1ср / k1 = yD Aå 1 / xD j 1 ,
или m М * M прå 1ср / k1 = m A * D Aå 1 / m j * D j 1 ,
так как M прå 1ср = D Aå 1 / D j 1 , то m A = m М * m j / k1 .
Графики, иллюстрирующие построение диаграммы работы, приведены на рис.7.1 6 и 7.1 7
3. Определение угловой скорости звена приведения
Определение закона движения звена приведения в виде диаграммы изменения угловой скорости в функции обобщенной координаты w 1= f(j 1) проводится по формуле
Диаграмма w 1 = f (j 1 ) приведена на рис. 7.18.
4. Определение времени цикла.
Время цикла определяется по диаграмме t= f (j 1). Для построения этой диаграммы проведем интегрирование диаграммы угловой скорости
Воспользуемся методом графического интегрирования обратной величины. При этом участок изменения обобщенной координаты, на котором проводится интегрирование, разбивается на несколько малых участков. В пределах каждого i -го участка кривая w 1 = f (j 1) заменяется прямой, соответствующей среднеинтегральному значению w 1ср i на этом участке. На оси ординат, откладываем отрезок интегрирования k2 (рис.7.19) . Ординаты среднеинтегральных значений w 1ср i проецируем на ось ординат. Точки пересечения проецирующих линий с осью ординат переносим по дугам окружности на продолжение оси абсцисс. Полученные на оси абсцисс точки, соединяем прямыми линиями с концом отрезка интегрирования. Из начала первого участка (на диаграмме времени) и до его конца под углом y 1 к оси абсцисс проводим прямую линию. Для второго участка аналогичная прямая проводится под углом y 2. Ее начало выбирается в точке пересечения предыдущего отрезка прямой с вертикалью проходящей начало второго участка. Проведя построения для всего интервала интегрирования, получим график времени. Масштаб этого графика определим из подобия треугольников
tg y 1 = k2 / yw 1ср1 = yD t1 / xD j 1 ,
или k1 /m w * w 1ср 1 = m t * D t1 / m j * D j 1 ,
так как 1/ w 1ср 1 = D t1 / D j 1 , то m w = k2* m j / m w .
5. Построение диаграммы угловой скорости в функции времени
Диаграмма угловой скорости w 1 = f ( t ) в функции времени строится по диаграммам w 1 = f (j 1 ) и t= f (j 1 ), исключением переменной j 1 .
6. Определение углового ускорения звена приведения
Для расчета углового ускорения звена приведения e 1 = f(j 1 ) можно воспользоваться двумя различными зависимостями:
а). e 1 = dw 1 /dt = dw 1/dj 1 * dj 1/dt = w 1 * dw 1/dj 1 ,
б). e 1 = dw 1/dt = М прå / Iпрå - w 12/(2* Iпрå ) * (d Iпрå /dj 1).
Применение первой формулы приводит к большим погрешностям, так как она основывается на использовании одной из конечных зависимостей расчета w 1 = f (j 1 ). Кроме того, в точках с нулевыми значениями w 1расчет по этой формуле дает неверный результат e 1 = 0. Поэтому проведем расчет зависимости e 1 = f(j 1 ) по второй формуле . Диаграмма функции e 1 = f(j 1 ) приведена на рис. 7.22.
Метод поднормали (графическое определение производной).
При определении в формуле углового ускорения производной d Iпрå /dj 1 часто используется метод поднормали. На графике дифференцируемой функции (рис. 23) в рассматриваемой точке проводят касательную t - t , нормаль n - n и ординату yIпрå i . Измеряют отрезок xi между точками пересечения с осью x ординаты и нормали. Рассчитывают производную с учетом масштабов по осям по формуле