|
|
ЛЕКЦИЯ 8 |
|
|
Краткое содержание: Установившийся режим движения машины. Неравномерность движения и метолы ее регулирования. Коэффициент неравномерности. Маховик и его роль в регулировании неравномерности движения. Решение задачи регулирования хода машины по методу Н.И.Мерцалова. Алгоритм решения прямой задачи динамики при установившемся режиме движения машины. Статическая характеристика асинхронного электродвигателя и ее влияние на неравномерность движения. Устойчивость движения машины с асинхронным электродвигателем.
Установившийся режим движения машины.
Установившийся режим движения машины наступает тогда когда работа внешних сил за цикл не изменяет ее энергии, то есть суммарная работа внешних сил за цикл движения равна нулю.
Установившееся движение Адц = Асц , Ац = D Т = 0 ,
где
за цикл движущих сил и сил сопротивления,
j 10 - начальное значение обобщенной координаты, D j ц - приращение обобщенной координаты за цикл.
Рис. 8.1
В пределах цикла текущее значение суммарной работы не равно нулю. Работа может быть то положительной, то отрицательной. При положительной величине работы машина увеличивает свою кинетическую энергию за счет увеличения скорости, то есть разгоняется. На участках, где суммарная работа отрицательна, кинетическая энергия и скорость машины уменьшается, машина притормаживается. В установившемся режиме величины увеличения скорости на участках разгона и снижения на участках торможения за цикл равны, поэтому средняя скорость движения w 1ср = const постоянна. В машинах приведенный момент инерции которых зависит от обобщенной координаты, на неравномерность движения оказывает влияние величина изменения приведенного момента инерции. Колебания скорости изменения обобщенной координаты машины не оказывают прямого влияния на фундамент машины. Поэтому эти колебания и вызывающие их причины определяют, так называемую, внутреннюю виброактивность машины.
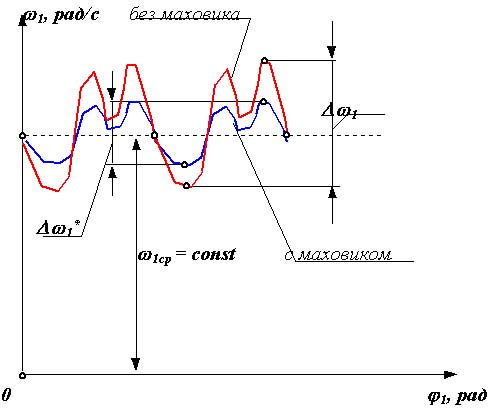
Величина амплитуды колебаний скорости D w 1 определяется разностью между максимальной w 1max и минимальной w 1min скоростями. За меру измерения колебаний скорости в установившемся режиме принята относительная величина,
которая называется коэффициентом изменения средней скорости
d = D w 1 /w 1ср = ( w 1max-- w 1min ) / w 1ср ,
где w 1ср = ( w 1max + w 1min ) / 2 - средняя угловая скорость машины.
Для различных машин в зависимости от требований нормального функционирования (обрыв нитей в прядильных машинах, снижение чистоты поверхности в металлорежущих станках, нагрев обмоток и снижение КПД в электрогенераторах и т.д.) допускаются различные максимальные значения коэффициента изменения средней скорости. Существующая нормативная документация устанавливает следующие допустимые значения коэффициента неравномерности [d ]:
Чтобы снизить внутреннюю виброактивность и неравномерность движения применяются различные методы:
Рассмотрим подробно наиболее простой способ регулирования неравномерности вращения - установку дополнительной маховой массы или маховика. Маховик в машине выполняет роль аккумулятора кинетической энергии. При разгоне часть положительной работы внешних сил расходуется на увеличение кинетической энергии маховика и скорость до которой разгоняется система становится меньше, при торможении маховик отдает запасенную энергию обратно в систему и величина снижения скорости машины уменьшается. Сказанное иллюстрируется графиками, изображенными на рис. 8.2. На этом рисунке: D w 1 - изменение угловой скорости до установки маховика, D w 1* - после установки маховика. Отсюда можно сделать вывод: чем больше дополнительная маховая масса, тем меньше изменение D w 1* и коэффициент неравномерности d .
Определение закона движения D w 1 = f ( j 1 ) и приведенного момента инерции IпрI .
Из теоремы об изменении кинетической энергии можно записать
D T = T - Tнач = А, где D T = D TI + D TII = А и TI = IпрI*w 21/2 .
Если допустить, что D TI » dTI , то dTI = IпрI *w 1 * dw 1 . Так как при установившемся движении D w 1 < < w 1 , то можно считать что w 1 » w 1ср . Тогда, переходя к конечным приращениям, получим:
D TI » IпрI *w 1ср * D w 1 , откуда D w 1 » D TI / IпрI *w 1ср .
Так как IпрI *w 1ср = const , то можно записать что D TImax » IпрI *w 1ср * D w 1max, где D TImax - изменение кинетической энергии первой группы звеньев за цикл, D w 1max - изменение угловой скорости за цикл. Подставим в эту формулу выражение для коэффициента неравномерности d = D w 1max /w 1ср и получим формулу для расчета приведенного момента инерции первой группы, который обеспечивает заданный коэффициент неравномерности
IпрI = D TImax / (d *w 1ср2 ) .
Определение момента инерции дополнительной маховой массы (маховика).
Рассмотрим определение маховика для примера рассмотренного в лекции 6 - одноцилиндрового поршневого насоса. В первую группу звеньев в этом примере входят: ротор электродвигателя Iрот, детали редуктора I прред, кривошипный вал I01 и маховик Iм
IпрI = I пррот + I прред + I01 + Iм,
откуда момент инерции маховика
Iм= IпрI - ( I прред + I01 + Iм ).
Решение задачи регулирования хода машины по методу Н.И.Мерцалова.
При расчете маховика (или решении задачи регулирования хода машины) по методу Н.И.Мерцалова задача решается в следующей последовательности:
Мпрсср = Асц/ (2p );
и для него строится диаграмма работы Ас = f(j 1). Суммированием этой диаграммы и диаграммы Ад = f(j 1) получаем диаграмму А = f(j 1).
TI = А -TII + Tнач = А-TII + TIнач + TIIнач .
Так как начальные значения кинетической энергии неизвестны, то если учесть, что Tнач = TIнач + TIIнач , D TI = TI - TIнач , D TII = TII - TIIнач , получим
D TI = А- D TII ,
то есть, вычитая из суммарной работы приращение кинетической энергии второй группы, получим приращение кинетической энергии первой группы.
По функции D TI = f(j 1) определяется максимальное изменение кинетиской энергии за цикл D TImax . Второй раз делаем допущение w 1 » w 1ср на основании которого, как показано выше, можно записать
IпрI = D TImax / (d *w 1ср2).
Из этого выражения, определив предварительно D TImax , можно решить две задачи:
Алгоритм решения прямой задачи динамики при установившемся режиме движения машины.
Решение этой задачи рассмотрим на конкретном примере машинного агрегата привода буровой установки.
Дано: Кинематическая схема машины - lAB = 0.12м, lBC = 0.528м, lBS2 = 0.169м, средняя частота вращения кривошипа - w 1ср = 47.124 рад/с2, массы звеньев -
m2 = 24.2 кг, m3 = 36.2 кг, момент инерции - I 2S = 1.21 кг* м2, I 10 = 2.72 кг* м2, максимальное давление в цилиндре - pmax = 4.4 МПа , коэффициент неравномерности вращения [d ] = 1/80 , индикаторная диаграмма (приведена на рис. 8.3) .
_________________________________________________________________
Определить: закон движения машины w 1 = f(j 1) и e 1 = f(j 1), момент инерции маховика Iдоп , обеспечивающий заданную неравномерность вращения [d ].
Рассмотрим следующие векторные контуры, изображенные на рис. 8.4 рядом со схемой механизма:
l AB + l CB = l AC ; l AS2 = l AB + l BS2 .
Для первого векторного контура l AB+ l CB = l AC проекции на оси координат
lAB * cos j 1 + lCB * cos j 2 = xC = 0,
lAB * sin j 1 + lCB * sin j 2 = yC = SC,
j 2 = arccos ( - lAB * cos j 1 / lBC ).
Рис. 8.4
Производные от этих выражений
- lAB * sin j 1 - lCB * u21* sin j 2 = 0 ,
lAB * cos j 1 + lCB * u21* cos j 2 = VqC ,
позволяют определить первые передаточные функции
u21 = - lAB * sin j 1 / ( lCB* sin j 2 ),
VqC = lAB * cos j 1 + lCB * u21* cos j 2 .
Для третьего векторного контура l AS2 = l AB + l BS2 проекции на оси координат
xS2 = lAB * cos j 1 + lBS2 * cos j 2 ,
yS2 = lAB * sin j 1 + lBS2 * sin j 2 .
Производные от этих выражений
VqS2x = - lAB * sin j 1 - lBS2 * u21* sin j 2 ,
VqS2y = lAB * cos j 1 + lBS2 * u21* cos j 2 ,
позволяют определить первую передаточную функцию
Рис. 8.5
1.2. Определение приведенного момента движущих сил Мпрд .
Индикаторную диаграмму (рис.8.3) строим по заданным значениям давления в цилиндре двигателя. Отрезок хода поршня НC* m i делим на 10 интервалов. В каждой точке деления строим ординату диаграммы, задавшись (при pi /pmax = 1) максимальной ординатой ypmax . Тогда текущее значение ординаты
ypi= ypmax * ( pi/pmax ),
где pmax= 4.4 МПа.
Масштаб индикаторной диаграммы
m p = ypmax /pmax .
Площадь поршня Sп = p *dп2 /4 .
При построении графика силы, действующей на поршень, ординаты этого графика принимаем равными ординатам индикаторной диаграммы. Тогда масштаб силы
m F = m p/Sп.
Для исследуемого механизма приведенный суммарной момент состоит из двух составляющих: движущей силы и момента сил сопротивления
Mпр = Mпрд + Mпрс .
Приведенный момент движущей силы определяется в текущем положении механизма по формуле
где F дi - значение движущей силы,
F дi = yFдi / m F ,
где yFдi - ордината силы сопротивления,
m F - масштаб диаграммы сил.
VqСi - значение передаточной функции в рассматриваемом положении механизма,
- угол между вектором силы и вектором скорости точки ее приложения.
Масштаб диаграммы по оси абсцисс определяется по формуле
m j = b / 2*p ,
где b - база диаграммы ( отрезок оси абсцисс, который изображает цикл изменения обобщенной координаты).
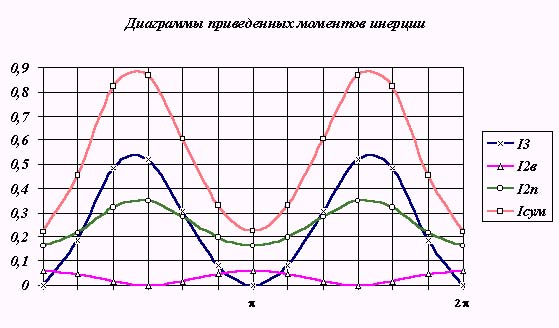
1.3. Построение диаграммы приведенных моментов инерции Ivпр = I IIпр.
Инерционные характеристики звеньев механизма в его динамической модели представлены суммарным приведенным моментом инерции. При расчете эту характеристику динамической модели представляетсяв виде суммы двух составляющих переменной Ivпр = I IIпр и постоянной Icпр = IIпр. Первая определяется массами и моментами инерции звеньев, передаточные функции которых постоянны, вторые - массами и моментами инерции звеньев передаточные функции которых переменны.
Проведем расчет переменной части приведенного момента инерции Ivпр = I IIпр. Для рассматриваемого механизма во вторую группу звеньев входят звенья 2 и 3. Звено 3 совершает поступательное движение, звено 2 -плоское. Расчет переменной части приведенного момента проводится по следующим зависимостям:
Ivпр = I IIпр = I2Впр + I2Ппр+ I3пр,
где
I2Ппр = m 2 * VqS22, I2Впр = IS2 * u212, I3пр= m3* VqС2,
Рис. 8.7
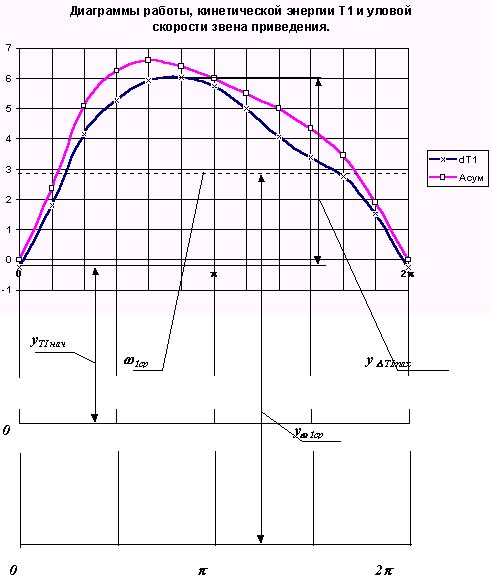
2. Построение диаграмм работы движущей силы, сил сопротивления и суммарной работы.
Диаграмму работы движущей силы получим интегрируя диаграмму ее приведенного момента
Интегрирование проведем графическим методом (рис.8.8), приняв при этом отрезок интегрирования равным k1 . Тогда масштаб полученной диаграммы работы движущей силы будет равен
tg y 1 = yD Aд / xD j 1 = yMпрд1/ k1 D Aд * m А/ (D j 1 * m j ) = Mпр д1 * m М / k1
так как D Aд / D j 1 = Mпр д1 , то m А / m j = m М / k1 , откуда
m А = m М *m j / k1 .
Величина среднеинтегрального момента сил сопротивления определяется по формуле
Мпрсср = Асц/ (2p ).
3. Построение диаграмм кинетических энергий.
Диаграммы кинетических энергий для первой и второй групп звеньев получает на основании теоремы об изменении кинетической энергии системы
D Т = Т - Тнач, A = D Т I + D Т II .
График кинетической энергии второй группы звеньев получим из зависимости
Т II = III пр*w 1ср2 /2,
принимая, что w 1 » w 1ср . Тогда диаграмма приведенного момента инерции второй группы звеньев в масштабе рассчитанном по формуле
yI = yT IпрII * m I = (IпрII * w 1ср2 / 2) * m T , откуда
m T = 2* m I /w 1ср2 ,
соответствует диаграмме кинетической энергии ТII .
График кинетической энергии первой группы звеньев приближенно строим по уравнению
ТI = Т - ТII .
В каждом положении механизма из ординат кривой A= f (j 1) вычитаем ординаты yTII и получаем ординаты искомой диаграммы TI = f (j 1). Для этого необходимо ординаты диаграммы TII = f (j 1) из масштаба m T перевести в масштаб m A* по формуле
yTII* = yTII * m A*/ m T .
Диаграмма кинетической энергии первой группы звеньев представлена на рис. 8.9.
4. Определение необходимого момента инерции маховых масс первой группы
Максимальное изменение кинетической энергии звеньев перD вой группы за цикл определяем по диаграмме
D TImax = ( y D TImax )/ m A .
Тогда необходимый момент инерции маховых масс первой группы звеньев, обеспечивающий заданный коэффициент неравномерности, равен
IIпр = D TImax / (w 1ср2 * [d ] ) .
4.1. Определение момента инерции дополнительной маховой массы.
В нашем случае момент инерции дополнительной маховой массы рассчитывается по следующей зависимости
Iдоп = IIпр - I10 ,
где I10 - момент инерции коленчатого вала .
5. Построение приближенной диаграммы угловой скорости
Если считать, что w 1 » w 1ср , то
D TI = IIпр *w 1ср * D w 1,
то есть диаграмма изменения кинетической энергии первой группы звеньев D TI= f(j 1) в другом масштабе соответствует диаграмме изменения угловой скорости D w 1 = f (j 1). Если считать что ординаты диаграмм равны, то
yD w 1 = yD TI m A* D TI = m w * D w 1 m A* IIпр *w 1ср * D w 1 = m w * D w 1 ,
откуда
m w = m A* IIпр *w 1ср .
Ордината средней угловой скорости ( для определения положения начала координат на диаграмме угловой скорости )
yw 1ср = w 1ср *m w .
После определения положения оси абсцисс на диаграмме угловой скорости можно определить начальное значение угловой скорости
w 10 = yw 10 /m w ,
а по ней кинетическую энергию механизма в начальном положении
TI нач = IIпр *w 1ср2 /2 .
6. Определение размеров маховика.
Принимаем конструктивное исполнение маховика - диск. Тогда его основные размеры и масса определятся по следующим зависимостям:
наружный диаметр
ширина b = y b * D ,
масса m = 1230* D 3,
где r = 7.8 кг/дм3 - плотность материала маховика ,
y b - коэффициент ширины .
7. Определение углового ускорения звена приведения.
Как отмечено ранее для расчета углового ускорения звена приведения e 1 = f(j 1 ) лучше пользоваться формулой :
e 1 = dw 1/dt = М пр/ Iпр- w 12/(2* Iпр) * (d Iпр /dj 1).
Необходимые для расчета значения величин определяем по ранее построенным диаграммам. Диаграмма функции e 1 = f(j 1 ) приведена на рис. 8.10.
Рис. 8.10
Приведенная статическая характеристика асинхронного электродвигателя. Понятие о устойчивости работы машины.
Как отмечалось ранее, силы действующие на механизмы зависят не только от положения или обобщенной координаты, а зависят и от времени или от скорости. Эти зависимости обычно определяются экспериментально и называются механическими характеристиками машины. Механическая характеристика приведенная к обобщенной координате или скорости называется приведенной механической характеристикой. В качестве примера рассмотрим приведенную статическую характеристику асинхронного электродвигателя.
На диаграмме: М прдп - приведенный пусковой момент; М прдн - приведенный номинальный крутящий момент; М прдк или М прдmax - приведенный критический или максимальный момент; w 1н - номинальная круговая частота вращения звена приведения; w 1хх или w 1с - частота вращения звена приведения на холостом ходу или синхронная. Уравнение приведенной статической характеристики асинхронного электродвигателя на линеаризованном участке устойчивой части
М прд = b1* + k1**w 1 ,
где М прд - приведенный движущий момент на звене приведения,
w 1 - круговая частота звена приведения ,
b1* = М прдн * w 1 /(w 1с - w 1н ) , k1* = - М прдн / (w 1с - w 1н ).
Как на исходной статической характеристике двигателя, так и на приведенной можно выделить два участка: устойчивый - bd и неустойчивый - ab. На устойчивом участке при увеличении момента сопротивления на валу двигателя частота вращения уменьшается, обеспечивая сохранение мощности примерно на постоянном уровне, на неустойчивом участке работа двигателя невозможна, так как в любой точке этого участка увеличение момента сопротивления на валу двигателя должно сопровождаться увеличением частоты вращения и увеличением мощности двигателя, при этом моменты сопротивления больше пускового момента двигателя. При увеличении момента сопротивления на валу звена приведения до величины большей Мпрдmax двигатель попадает в зону неустойчивой характеристики и останавливается. Для устойчивой работы машины необходимо, чтобы колебания момента сопротивления на
валу звена приведения не выходили за пределы линейной части устойчивого участка приведенной статической характеристики.
Учет приведенной статической характеристики при анализе
динамических процессов в машине.
Учет влияния статической характеристики двигателя на закон движения машины можно проводить различными методами:
Рассмотрим решение задачи методом последовательных приближений для машинного агрегата с приводом от асинхронного электродвигателя (пример с поршневым насосом в лекции 6). При первом приближении решается задача определения закона движения без учета статической характеристики, по алгоритму описанному в предыдущем разделе. Затем определяется приведенная статическая характеристика и по ней определяются значения движущего момента при каждом значении угловой скорости, рассчитанной на первом этапе (при первом приближении). По этим значениям момента строится диаграмма движущего момента второго приближения Мпрд(2), затем определяется суммарная работа, кинетическая энергия первой группы звеньев и угловая скорость звена приведения при втором приближении. Далее эти действия повторяются пока различия между результатами расчета на последующем этапе будут отличаться от результатов предыдущего на величину меньшую заданной погрешности. На рис. 8.12 показано графическое решения задачи при втором приближении.